事業概要
(株)HIRO ICT 研究所の今までの主な事業をご紹介します。
タブレットを使用した遠隔見守り支援ツール(トークA愛)の製品化(2018/5/25)
「チャット電話」機能による遠隔見守り支援
タブレットとロボット(PaPeRo i)を使用した遠隔見守り支援ツール(トークA愛)の製品化しました。
「トークA愛」は、介護者と被介護者の間のコミュニケーションツールとして「チャット電話」と呼ばれる機能を搭載しています。
「チャット電話」は、以下の「問いかけ型」「呼びかけ型」「電話型」の三種類のコミュケーションをサポートします。
- 問いかけ型チャット電話機能: 被介護者→システム(介護者の代行)
- 音声による被介護者の質問や要求に答えます(下図① )。
- 呼びかけ型チャット電話機能: システム(介護者の代行)→被介護者
- 音声によるアドバイスで、被介護者を見守り、認知症や病気を予防します(下図②)。
- 電話型チャット電話機能: 介護者⇔被介護者
- 介護と被介護者の間のリアルタイムなチャット電話機能をサポートします(下図③)。

「トークA愛」のチャット電話機能
「SIP電話」機能のサポート
「チャット電話」機能を補完するために「SIP電話」機能のサポートしております。
「チャット電話」では、音声データを直接、相手に送信しないで、音声認識で一旦、テキストに変えて送信し、 相手側もテキストを音声合成して発話するので、若干のタイムラグが発生します。
アプリケーションによっては、遅延のない完全なリアリタイムな会話をしたい場合もあるので、 「トークA愛」では「SIP電話」機能をサポートすることでこの問題を解決しています。
ロボット(PaPeRo-i)を使用した空間知能化システムの製品化
ロボット(PaPeRo-i)を使用する
人間(ホモサピエンス)は会話する動物です。 人間は、会話能力の差でネアンデルタ-ル人に勝ち、地球の王者になりました。
コンピュータが人間の脳の能力に迫ることで、何か(シンギュラリティ)が起きると言う説もありますが、 人間とネアンデルタ-ル人の脳の能力の差は少ないとされています。
であれば、コンピュータは、まず、人間との会話能力を身に着けるべきでじゃないでしょうか。
しかし、人間の形をしていないコンピュータが会話を始めると、人間はギョッとします。 そこで、人間の形をしているロボットを導入する必要があります。
(株)HIRO ICT 研究所では、空間知能化を実現するロボットとして、 NECプラットフォームズ社の「PaPeRo-i」を採用しております。
ロボット「PaPeRo-i」の制御には、「お話AIちゃん」と呼ばれるラズベリ(Raspberry PI 3B)が使用されます。
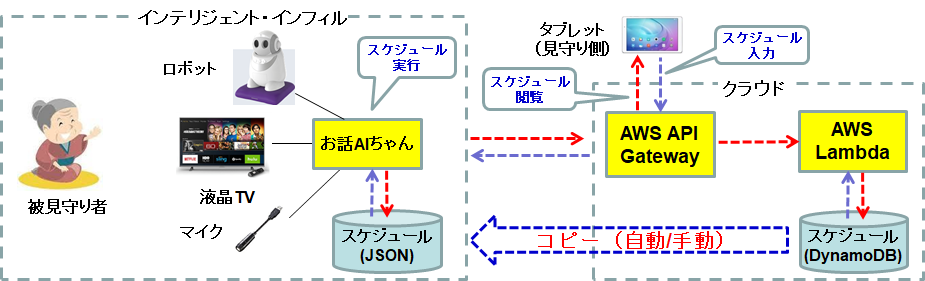
下図に「お話AIちゃん」を使用した空間知能化システムのイメージを示します。
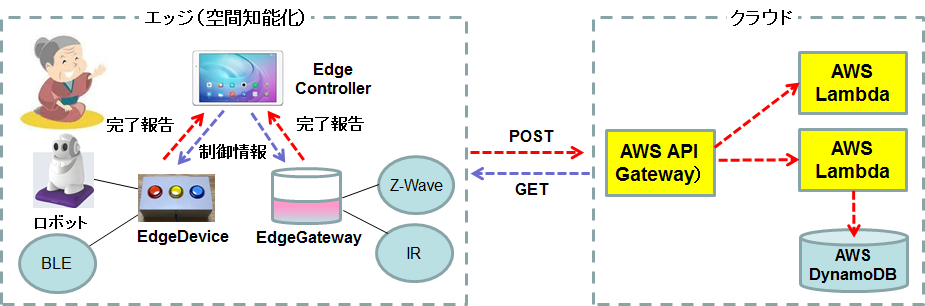
「お話AIちゃん」を使用した空間知能化システム
ロボット「PaPeRo-i」と「お話AIちゃん」との間の接続は、Ethernet経由で行われますから、 ラズベリ(Raspberry PI 3B)は、ロボット「PaPeRo-i」の頭脳とも言えます。
「お話AIちゃん」には、赤・黄・青の三色ボタンが付いています。 利用者は、この三色ボタンと音声入力を使用してロボット「PaPeRo-i」と会話することができます。
「お話AIちゃん」の構成要素
「お話AIちゃん」を使用した空間知能化システムは、以下の構成要素から構成されます。
-
ロボット(PaPeRo-i)
→独居高齢者と会話をするロボット(マイク&スピーカ)
→「お話AIちゃん」とは、Ethernetで接続されます
-
クラウド(AWS、LINEなど)
→クラウドネィティブ機能により空間知能化を支援します。
→「お話AIちゃん」とは、無線によるインターネット(WiFiルータや無線APを使用)で接続されます
-
見守りセンサー(Yokoduino)
→人感/温度/湿度/気圧/電池残容量センサーを収容できる
→「お話AIちゃん」とは、BLE(Bluetooth Low Energy)で接続されます
ロボット(PaPeRo-i)が、独居高齢者の家族になる
ロボット(PaPeRo-i)は、独居高齢者の家族になる必要があります。
独居高齢者の家族になる機能を実現するために、(株)HIRO ICT 研究所では、「お話AIちゃん」と言うソフトウェアを開発しました。
「お話AIちゃん」は、ラズパイ(Raspberry PI 3B)上で動きます。
「お話AIちゃん」によるロボット(PaPeRo-i)の制御
なお、「お話AIちゃん」は、ロボット(PaPeRo-i)が接続されていない場合は、内蔵するマイクロフォンとスピーカで代替することができます。
「高齢者の記憶と認知機能低下に対する 生活支援ロボットシステムの開発」プロジェクトへ参画
独立行政法人科学技術振興機構(JST)のS-イノベ(戦略的イノベーション創出プログラム)で行われている上記プロジェクトに参画。
概要と目的
認知機能の低下により、日付やスケジュールが把握できなくなることで、生活に支障をきたす高齢者が増加している中で このプロジェクトでは、生活の現場に密着した技術開発(フィー ルド・ベースド・イノベーション)に基づき、 高齢者の自立・自律した生活をより長く実現するために、生活に必要な情報 を確実に伝えるロボットシステムを開発する。
さらに、利用者個々に対応する導入サービスや供給体制を含めた、トータルな高齢者支援産業の創出を目指す。
推進体制
- <推進責任者> 厚生労働省 国立障害者リハビリテーションセンター研究所 福祉機器開発部
- <開発リーダ> 日本電気株式会社
当社の役割
- タブレットによる発話・音声認識
- サーバシステム開発 など

高齢者の記憶と認知機能低下に対する 生活支援ロボットシステム
高齢糖尿病患者の重症化を予防する在宅インスリン自己注射見守りシステム
本研究の概要と目的
- 急増している高齢の糖尿病患者が、在宅インスリン自己注射を確実に継続できるように、「見守りシステムを開発・検証」し、重症化(透析導入)の予防を促進する。
- 具体的には、“注射器の格納容器にセンサを付けて開閉・取出しをモニタリングすること”と“コミュニケーションロボットによる注射の声掛け"を行う。
推進形態
第一次臨床実験
下記体制にて2014年3月約1ヶ月間千葉県九十九里地区の被験者にて臨床実験⇒データの収集は成功
- <臨床研究責任者> 千葉県立東金病院 院長:平井 愛山
- <研究統括責任者> 創価女子短期大学 准教授: 亀田 多江
- <開発研究責任者> 株式会社 HIRO ICT研究所
第2次臨床実験
約100名の被験者による有効性検証
⇒相当量の試作機が必要となることから中小企業ものづくり補助金申請による試作機の開発(推進中)
システム構成機器
独居老人宅に設置するインスリン注射器ケースとインスリン見守り君
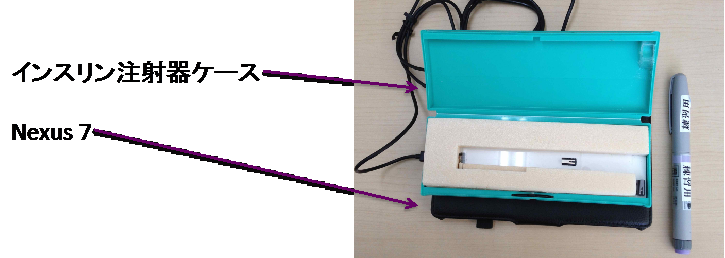
独居老人宅に設置するインスリン注射器ケースとインスリン見守り君
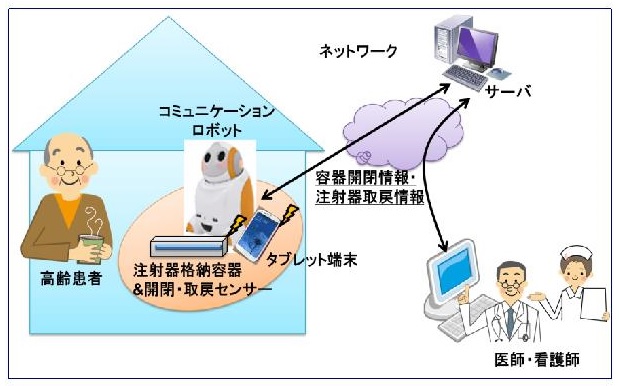
インスリン見守りシステムの概要(第一次臨床実験では、コミュニケーションロボットは使用せず)
屋内移動体(作業員や搬送機器)の動線把握システムの開発
概要と目的
- 倉庫内の移動体(作業員の方、フォークリフトなど)の移動動線(時刻、X、Y座標)を稼働時間帯・数日間に渉って計測
- 個々の移動体の移動ビジュアルツール、分析ツールは株式会社シーイーシーのRaFLOW(物流業務最適化支援ツール)を使用
-
業務改善を指向されている方に移動体動線計測データを提供
(滞留個所分析、動線の重複やクロス、集荷・検品エリアの混雑度の把握などから、棚レイアウト、高頻度ピッキング品の配置、ピッキングスケジューリングなどの検討)
規模
- 現状では、最大倉庫面積約2,000坪(6,600㎡)を想定しています
- 移動体総数最大100移動体(移動局)
- 固定局:最大550台
KAIZEN CAPSULE(株式会社 レンタルのニッケン登録商標)では
- 測定したい現場は変化が激しく複数あるため、必要な時に移動体動線計測データのご提供
- 移動局;作業員は首からぶら下げ、搬送機器は天井に設置。固定局からのIDを受信し、移動局が持っているマップに対応し現在地を特定する。
- 固定局;設置場所のX、Y座標に対応するIDを発信。の上部に数m間隔で設置

移動局

基地局
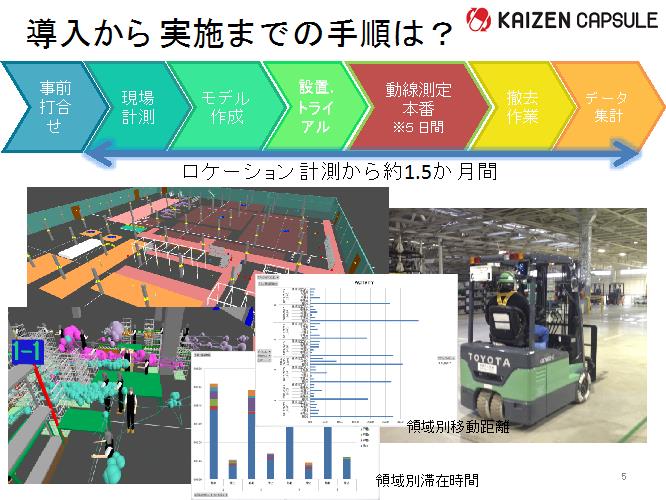
導入から実施までの手順は?
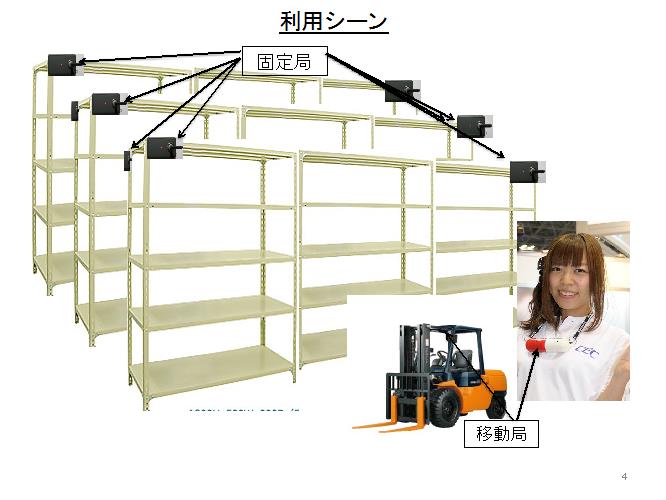
利用シーン
「屋内移動体の動線把握システム」の映像によるご紹介
屋内移動体の動線把握システム
「屋内移動体の動線把握システム」のご紹介
こんにちは。
いらっしゃいませ。
屋内移動体・動線・測位システムのご説明をさせていただきます。
屋内での移動体・動線・測位システムは、超音波を使用するもの、WiFi、RFID、カメラ、ジャイロと加速度センサー・磁気方位センサー、 屋内GPSを使用するものなど多くの方式が有りますが、実用的に使えるものはまだ限られています。
株式会社HIRO ICT研究所では、センサー通信に使われるZigBeeと云う微弱電波での電波強度を測定すること、不安定な部分を 各種センサーで補正することで、実用的な屋内移動体の動線測位システムを開発しました。
本システムは株式会社・レンタルのニッケン様のご依頼により開発を行った来たもので、改善カプセルと云うレンタルのニッケン様の 登録商標で、事業展開が開始されています。
用途としましては、屋内の倉庫や工場内で作業されている作業員のかたやフォークリフトなどの移動した動線を、1週間程、度計測し、 このデータを分析することで、作業場所の安全性をより高めたり、レイアウトの変更などで効率化を図ることを、目的にしています。
想定しています測定環境は、約2,000坪(6,600平方メートル)程度までのエリアに棚が並ぶ通路があり、この通路を移動する 移動体の動線のトラッキングを行います。
移動体が移動する棚の上部には、5から10メートル間隔で固定局と呼んでいます、ZigBee電波を、発信するマーカーを取り付けています。
移動体が人の場合は、移動局と呼ばれるカプセル型の端末を首からぶらさげて作業をします。移動体がフォークリフトのような搬送機器では 天井に設置します。
この移動局は、近くにあるいくつかの固定局からの電波強度で自分の位置を特定し、位置がおかしい場合には、移動局が持っている各種 のセンサーを使って自分の位置を補正します。
得られた位置情報は、時刻と、X、Y座標としてこの移動局内に格納されたり、WiFiによりサーバへ送ります。 これらの移動体は、100個まで同時に計測することが出来ます。
ここで得られた移動体動線計測データは、滞留個所の分析、動線の重複やクロス、集荷・検品エリアの混雑度把握、棚レイアウト、 高頻度ピッキング品の配置、ピッキングスケージューリング等の検討に利用されます。
ご説明を終了します。ご静聴、ありがとうございました。

コスモス1