AIシステム開発者向けページ - トップページ
AIシステム開発者向けページのページにようこそ。
What's New!(2018/5/30)
タブレット(Android)用の「トークA愛」を開発しました。(2018/5/30)
「トークA愛」の機能概要
| 番号 | 機能 | 説明 |
|---|---|---|
| 1. | チャット電話機能 | チャット電話機能は、 |
| 2. | チャットBOT機能 | チャットBOT機能は、 |
「トークA愛」の問題点(2018/5/30)
| 番号 | 内容 | 修正 |
|---|---|---|
| 1. | WebSocketがエラー発生でCloseされた場合のリカバリ処理(自動あるいは手動) | |
| 2. | WebSocketの接続状態の表示→エラー発生時間・例外・応答がクリアされない | |
| 3. | WebSocketの接続状態の表示→エラー発生時間・例外・応答がクリアされない |
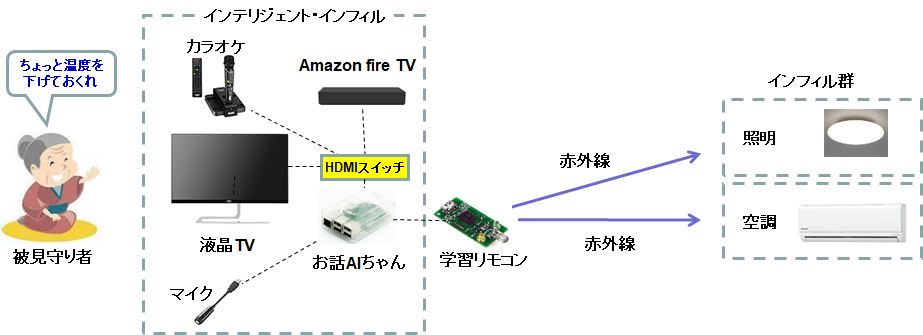
音声による家電品の制御機能を追加しました。(2016/10/9)
制御用マイコン(Raspberry PI 3B)に以下の機能を接続できるようにしました。(一部、開発中)
- 電源スイッチ制御
- ボタン
- 液晶TV用D級アンプ(開発中)
電源スイッチ制御
「電源スイッチ制御」装置は、扇風機などの家電品を接続できる電源オンオフ制御が可能なコンセントです。
タブレットアプリの「お話AIちゃん」と連動させることで以下の事ができます。
- タブレットに「暑いぞ」と言えば扇風機が回ります。
- タブレットに「寒いぞ」と言えば扇風機が止まります。
ボタン
「ボタン」は、赤、黄、青の3つのボタンがあります。
タブレットアプリの「お話AIちゃん」と連動させることで以下の事ができます。
- 赤色ボタンは、独居高齢者等のための緊急ボタンであり、タブレットが自動的に(勝手に)前面カメラと後面カメラの映像を撮影し、 メールやLINEで映像を関係者(娘さんや息子さん等)に映像を送ることができます。
- 青色ボタンは、音声入力ボタンとし、タブレットと音声会話を始めることができます。 わざわざ、タブレット画面のボタンを押す手間が省けます。
- 黄色ボタンは、将来用です。
液晶TV用D級アンプ(開発中)
「液晶TV用D級アンプ」は、液晶TVの音声出力を制御するD級アンプです。
タブレットアプリの「お話AIちゃん」と連動させることで以下の事ができます。
- 「お話AIちゃん」が独居高齢者等に話かける時や、独居高齢者等が「お話AIちゃん」に話かける時に、 液晶TVの音がうるさくては、「お話AIちゃん」と独居高齢者等との会話ができません。
- そこで、「お話AIちゃん」が独居高齢者等に話かける時や、独居高齢者等が「お話AIちゃん」に話かける時に、 「液晶TV用D級アンプ」は、液晶TVの音声出力を一時的に下げることができます。
- 勿論、「お話AIちゃん」と独居高齢者等との会話が終了すると、液晶TVの音声出力は元のレベルに戻ります。
音声による家電品の制御
以下の内容に注力したいと思います。(2016/8/3)
- ECHONET Liteの利用
- ロボット(PaPeRo-i)の利用
- Amazon Alexaを真似した音声会話
- LINE BOTの利用
以下の内容に注力したいと思います。(2015/2/10)
- パターン認識
- 機械学習
- パターン認識と機械学習を応用した行動パターンの把握
- パターン認識と機械学習を応用した音声会話
AIシステム開発者向けページ - トップページの作成を開始(2014/12/8)
AIシステム開発者向けページのページの作成を開始しました。
コミュニケーションロボットは人間の役に立つか
機械工学系のコミュニケーションロボットはなかなか進歩しない
ロボットと言えば、メカトロニクスと言って、機械工学と電子工学の融合のような領域であるが、 実質的に機械工学系がロボット技術を牽引している。
ロボットと言えば、鉄腕アトムみたいなものを想像するので、まずは動くためのメカニズムが必要になる訳である。 メカニズムは機械工学であるから、機械工学系がロボット技術を牽引していることになる。
しかし、機械工学系がロボット技術を牽引している限り、鉄腕アトムみたいなコミュニケーションロボットは無理である。 なぜなら、人間とのコミュニケーション技術は、機械工学とは無縁の技術であるからである。
つまり、機械工学系のコミュニケーションロボットでは、なかなか進歩しないのである。 機械工学系のロボット技術は、所謂「制御技術」と呼ばれる技術であるが、 最新の「制御技術」は「ロバスト制御」などと呼ばれるらしいが、殆ど、数学の世界である。
最新の「制御技術」は、数学の世界の美しさに恍惚としているだけで、それをロボット作りに生かせないのが現状ではなかろうか。 なぜ、数学をロボット作りに生かせないかと言うと、機械工学系の技術者がコンピュータ技術に疎いからである。
数学をロボット作りに生かすためには、コンピュータ技術が必須になる。 ここで言うコンピュータ技術とはPCの事ではなく、現場で稼働するマイクロコンピュータ(マイコン)の技術を指す。 ロボットを制御するのは、PCではなくマイコンだからである。
機械工学系の制御技術者は、MATLABなどを駆使できるので、PCを使ったコンピュータ技術は詳しいかも知れないが、 現場で稼働するマイコンの技術までは手が出ないのが現状であろう。
しかしながら、機械工学系の技術には疎くても、コンピュータ技術だけでコミュニケーションロボットが作れる時代になっている。
鉄腕アトム
電子工学系のコミュニケーションロボットの出現が待たれる
機械工学系の制御技術者が、現場で稼働するマイコンの技術までは手が出ないのであれば、 マイコンの技術を有する電子工学系の技術者に頑張って頂くしかない。
しかし、当然ながら、マイコンの技術を有する電子工学系の技術者は、メカニズムに弱い。
となると、マイコンの技術を有する電子工学系の技術者が作るコミュニケーションロボットは、 あまり、メカニズムを持たないものの方が望ましい。
考えて見れば、コミュニケーションロボットが人間と同様に動く必要はなく、 キチンと人間とコミュニケーションができる機械(機器)であればいい訳である。
空間知能化と言う考えは、鉄腕アトムみたいな動くコミュニケーションロボットの出現を期待するのではなく、 空間(建物)自体をコミュニケーションロボットにしてしまえばいいと言う考えである。
この空間知能化と言う考え方が、まさに電子工学系のコミュニケーションロボットである。 空間知能化では高度なメカニズムを持つロボットは必要がない。
そもそも動くロボットを住宅に持ち込んで、それを住人である年寄りが足に引っ掛けて転んだらどうすのか。 自動車の欠陥エアバック以上の大問題になる可能性が高い。 現在の機械工学が、それを避ける技術(知能)など持ちあわせている筈がない。
ならば住宅に持ち込むロボットは動かないのが一番である。動かないのであればメカニズムは必要がない。 機械工学屋がいなくても電子工学屋だけで、動かないロボット(=空間知能化)を作れる理屈である。

鉄腕アトムに匹敵するロボットが出現するか
空間知能化に求められる技術
マイコンの技術を有する電子工学系の技術者が作る「動かないロボット(=空間知能化)」に必要な技術は何でしょうか。
以下の技術は、「動かないロボット(=空間知能化)」に必要なインフラ技術と言えます。
- マイコンボード作成技術
- 屋内無線通信技術(WiFi)
- タブレット(Android)アプリケーション構築技術
- タブレット(Android)によるスピーカ鳴動とマイクの利用技術
以下の技術は、「動かないロボット(=空間知能化)」に必要なアプリケーション技術(ソフトウェア)と言えます。
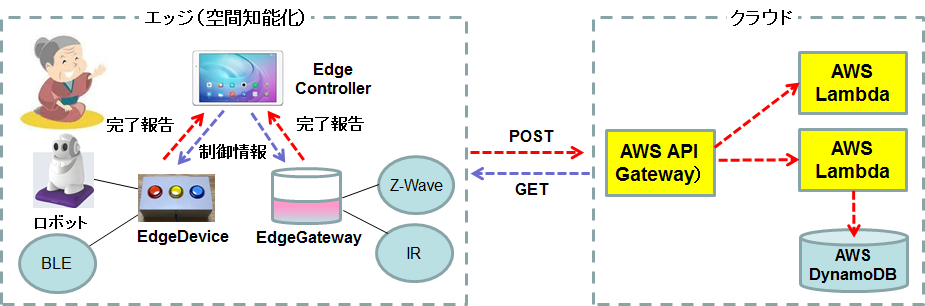
- エッジコンピューティング技術
- パターン認識
- 機械学習
- パターン認識と機械学習を応用した行動パターンの把握
- パターン認識と機械学習を応用した音声会話
従来のロボット技術に足らないのは、アプリケーション技術ではなかろうか。 人間とコミュニケーションをするロボットは「認識」と言う問題を避けて通れないが、 「認識」と言う問題はインフラ技術ではなく、アプリケーション技術(ソフトウェア)により解決できるのかも知れない。
コミュニケーションロボットは、当然ながら人間が言っていることを理解できる必要がある。 また、コミュニケーションロボットが人間に伝えたい情報を人間樣が理解できたかどうかも確認できる必要がある。 人間同士でもお互いを理解し合うのは難しいのに人間とロボットのコミュニケーションは可能なのだろうか。
現在のコミュニケーションロボットは、このような人間とのコミュニケーションが、どのレベルまでできるのであろうか。 二足歩行技術も大事だが、ロボットが人間を理解するためには、その前に、まずはパターン認識とか機械学習のような認識のための技術が必要になるのではなかろうか。

スピーカとマイクとだけでコミュニケーションロボットができる?
(株)HIRO ICT 研究所の考える空間知能化システム
以下の情報は、東京電機大学未来学部建築学科渡邊朗子研究室からお聞きしました。
おばあちゃんの原宿と言われる「巣鴨とげぬき地蔵商店街」で聞いてみました。
以下のようなロボットがあるといいなあと言うことでした。
【コミュニケーション】
- 「おはよう」「おやすみ」等の基本的な挨拶によるコミュニケーションができる。
- 緊急時に人を安心させたり、要求にすぐ対応し反応するコミュニケーションができる。
【セキュリティ】
- 「助けて」「緊急」などのSOSの言葉に反応し、自動的に通報してくれる。
- 状況に応じて、警察や病院などに連絡したり、処置方法を教えてくれる。
【サポート】
- 「暑い」「寒い」と言う言葉に反応し、エアコンなどを制御してくれる。
- 「暗い」「寝る」と言う言葉に反応し、照明の点灯などを制御してくれる。

とげぬき地蔵
介護二級の資格を持つ専門家の意見
グル-プホームで働いていた介護二級の資格を持つある女性(67歳)のご意見を以下に紹介します。
- 音声で薬などの促しをしてくれ、またそれに対して音声で返してくれるのは嬉しい。
- 電子機器は、なかなか老人の操作は難しいので、音声でやりとりできたら素晴らしい。
- グル-プホームでは、薬を忘れないように、カレンダー式のポケットに薬が置いてあった。
- テレビ機能は不要。なぜならテレビを見るのはリビングルームであることが多いから。
- 年寄は目が悪い人が多くタブレットのような画面が小さいものより大画面で見たい人が多い。
- カラオケマイクを使うような発想がいいと思う。
- タブレットの写真やイラストは色鮮やかな綺麗なものを見たい。
- 写真やイラストは、趣味に合わせたものや季節を感じさせるものが定期的に変化したらいい。
(株)HIRO ICT 研究所が考える「お話AIちゃん」の概要
(株)HIRO ICT 研究所では、上記のようなご要望を満たすために、タブレット(Android 5.0以上)上のアプリケーションである「お話AIちゃん」と言う製品を開発しております。
-
音声で薬などの促しをしてくれ、またそれに対して音声で返してくれるのは嬉しい。
→「お話AIちゃん」は、音声で薬などの促しをしてくれます。 また、利用者は、それに対して音声で返事することができます。
-
電子機器は、なかなか老人の操作は難しいので、音声でやりとりできたら素晴らしい。
→「お話AIちゃん」は、扇風機のような家電品の電源のオンオフ制御を音声で行うことができます。
-
グル-プホームでは、薬を忘れないように、カレンダー式のポケットに薬が置いてあった。
→「お話AIちゃん」は、オプションで服薬支援機器と連動できます。
-
テレビ機能は不要。なぜならテレビを見るのはリビングルームであることが多いから。
→「お話AIちゃん」は、テレビ機能はありませんが、無料の「Abema TV」を使用してニュースなどを見ることができます。
-
年寄は目が悪い人が多くタブレットのような画面が小さいものより大画面で見たい人が多い。
→「お話AIちゃん」をタブレットの代わりにAndroid TV(Nexus Playerなど)上で動かすことで、大画面に出力できます。 また、HDMI出力を持つタブレットも大画面に出力できます。
-
カラオケマイクを使うような発想がいいと思う。
→「お話AIちゃん」は、カラオケマイクを使うような感覚で使用できます。 カラオケマイクが利用者の歌に対して励みとして評価点を出すように、評価点を出すこともできます。
-
タブレットの写真やイラストは色鮮やかな綺麗なものを見たい。
→タブレットの画面は、FHD仕様(1920×1080以上)のものを使用していますので、写真やイラストを色鮮やかに綺麗に見ることができます。
- 写真やイラストは、趣味に合わせたものや季節を感じさせるものが定期的に変化したらいい。
→「お話AIちゃん」は、写真やイラストを趣味に合わせたり、季節を感じさせるものを定期的に変化させることができます。
「お話AIちゃん」
強化学習機能の搭載(開発中)
空間知能化を実現する強化学習機能の概要
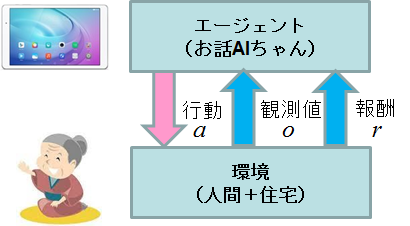
住宅における空間知能化を実現するために、「お話AIちゃん」に強化学習機能を搭載(開発中)します。
-
エージェント:
「お話AIちゃん」のことです。
-
環境:
「お話AIちゃん」が支援する独居高齢者とその住宅のことです。
-
観測値:
人感センサーのデータや、独居高齢者のお喋り(入力音声)のことです。
-
行動:
「お話AIちゃん」の独居高齢者に対するお喋り(出力音声)のことです。
-
報酬:
独居高齢者が「お話AIちゃん」に与える報酬(褒めた内容)のことです。
環境モデルを部分観測マルコフ決定過程(POMDP)と見なす
空間知能化を実現する強化学習機能の環境モデルとしては、部分観測マルコフ決定過程(POMDP)を使用します。
POMDPの環境に対応した強化学習法は、いくつかのアプローチに分類できます(検討中)。
- エージェント内部で,環境の状態遷移を推定/予測する方法(モデルベースに よる内部状態表現)
- 有限長の過去の状態や行動の履歴を用いた内部状態表現
- 確率的な政策を用いる方法
強化学習

(株)HIRO ICT 研究所(KBIC内)